空飛ぶクルマ×海上インフラで都市交通を再設計 東京ベイeSGプロジェクト、マルチモーダルMaaS実現に向けた実証成果を報告
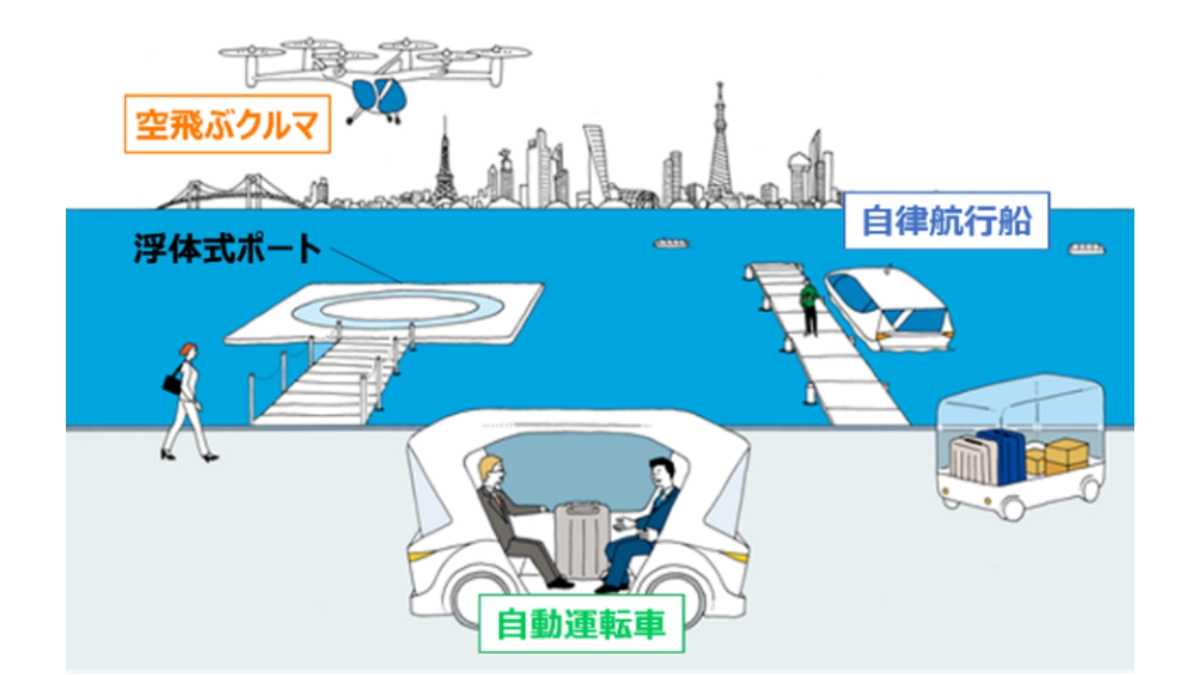
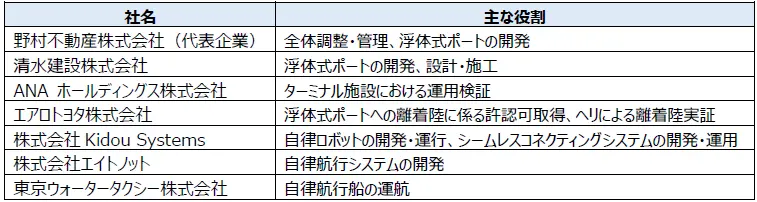
野村不動産、清水建設、ANAホールディングス、エアロトヨタ、Kidou Systems、エイトノット、東京ウォータータクシーで構成される事業グループは、東京都の「東京ベイeSGプロジェクト 令和5年度先行プロジェクト」において推進してきた、空飛ぶクルマ(eVTOL)用浮体式ポートを核としたマルチモーダルMaaSの実証成果を公表した。本取り組みは、陸・海・空の次世代モビリティをシームレスに接続する都市交通の高度化を目指すものであり、2023年10月より検証が進められてきた。
同プロジェクトは、中央防波堤エリアを実証フィールドとし、最先端技術の社会実装を目指す東京都主導の取り組み。都市部における交通混雑や環境負荷といった課題に対し、eVTOLや自律航行船、ロボットといった新たなモビリティを統合することで、持続可能な都市モデルの構築を狙う。
外海での離着陸や自律航行を実証
2025年12月に実施された2度目の実証では、より実運用に近い環境下で各技術の検証が行われた。特に注目されるのが、外海に設置された浮体式ポートにおける離着陸実証である。空飛ぶクルマを想定した小型ヘリコプターを用い、波や風の影響を受ける環境でも安定した離着陸が可能であることを確認。国が定めるバーティポート基準への適合性についても検証が進められた。
加えて、日の出から海の森間では自律航行船の運航実証を実施。避航操船アルゴリズムの高度化やユーザーインターフェースの改善を経て、複雑な海上環境においても自律的に航行できることを確認した。エイトノットが開発する自律航行技術が実環境で機能することを示した点は、海上モビリティの社会実装に向けた重要なステップといえる。
ターミナル運用とロボット連携も検証 人流・物流を支えるオペレーション設計を具体化
本実証では、モビリティ単体の性能検証にとどまらず、ターミナル施設の運用や人流設計にも踏み込んだ検証が行われた。2つの離着陸帯(FATO)を備えたバーティポートを想定し、保安検査や旅客誘導などのオペレーションを検証。必要な人員規模や動線設計を明らかにするとともに、手続きの機械化・省人化が求められるポイントを特定した。
さらに、自律ロボットによる搬送・案内の実証も実施。複数台のロボットを協調制御し、運行通知に応じた動作を実現することで、ターミナル内における効率的な運用の可能性を示した。人とロボットが共存する次世代インフラの具体像が浮かび上がりつつある。
モビリティ統合を支えるSCSの有効性を確認
複数のモビリティを一体的に管理する「シームレスコネクティングシステム(SCS)」についても検証が行われた。同システムは、異なるモビリティの運行状況を単一のインターフェース上で管理するもので、今回の実証ではロボットへの運行指令の発出や通信安定性の改善が確認された。
これにより、eVTOL、船舶、ロボットといった異種モビリティの統合管理が現実的なものとなり、マルチモーダルMaaSの実現に向けた技術基盤が大きく前進したといえる。
社会実装に向けた次のフェーズへ
本プロジェクトは2026年3月末をもって事業期間を終了したが、得られた知見は今後の社会実装フェーズへと引き継がれる。特に、空飛ぶクルマと海上交通を組み合わせた新たな都市交通モデルは、観光や物流、災害対応など多様な領域への応用が期待される。
エイトノットは、自律航行プラットフォーム「AI CAPTAIN」を軸に「海のDX」と船舶のロボット化を推進するスタートアップとして、本プロジェクトでも重要な役割を担った。今後は国内展開を加速させるとともに、2027年には北米市場への進出も見据える。
都市のあり方そのものを再定義する可能性を秘めたマルチモーダルMaaS。本実証は、その実現に向けた具体的な一歩を示すものとなった。
関連リンク:プレスリリース
(TOMORUBA編集部)


